Khoa học - Công Nghệ
Ứng dụng 'học máy' cho xe tự lái
Một nhóm nghiên cứu của Wayve – startup công nghệ ở Anh – vừa phát triển thành công một ứng dụng “mạng học nhiều tầng” (deep learning network hay DLN) cho xe tự lái.
Trong một nội dung đăng tải gần đây trên blog (cùng đoạn video trình diễn trên YouTube), đại diện của Wayne đã trình bày những nét chính về cách thức mà công nghệ của họ hoạt động và gợi ý thử nghiệm bằng xe thật trên đường thật.
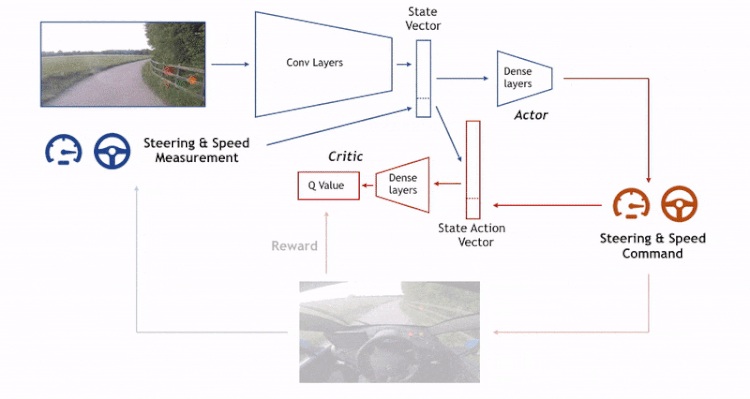 |
| Cơ chế hoạt động của công nghệ do Wayve phát triển. Ảnh: Tech Xplore |
Phần lớn những chiếc xe tự lái hiện nay đều sử dụng hệ thống bao gồm hàng loạt camera và cảm biến, bên cạnh các công cụ chỉ đường và vô số chương trình máy tính. Tuy nhiên cách tiếp cận như vậy, theo nhóm nghiên cứu của Wayve, đã đạt tới giới hạn của nó. Trên thực tế, những chiếc xe tự lái do các công ty lớn như Google phát triển, đã đạt được một số thành tựu nhất định, song chưa đủ tốt để có thể trở nên thông dụng, và cũng chưa đủ thông minh để tự làm chủ trong vô số các trường hợp có thể xảy đến trong quá trình lưu thông. Vì vậy, điều cần thiết ở đây là một máy tính thông minh hơn, nhưng không cần trang bị thêm các cảm biến hoặc chương trình.
Các chuyên gia của Wayne đã đặt cược vào một hướng tiếp cận mới được cho là thông minh hơn, nhờ sử dụng các thuật toán học tăng cường (reinforcement learning algorithms hay RLA) giống như các dự án theo kiểu Deepmind – cho phép máy học để thực hiện những hành vi giống như của người, thông qua luyện tập. Thuật toán RLA chính là trái tim hay linh hồn của các mạng DLN – máy sẽ tự học nhờ quá trình thực hiện, lặp đi lặp lại và cải tiến liên tục. Như trong trường hợp của xe tự lái, máy sẽ học cách để điều khiển một chiếc xe cho đến khi thành thục.
Để chứng minh phương án tiếp cận này tốt thế nào, nhóm nghiên cứu của Wayne đã trang bị cho chiếc Renault Twizy camera đơn và chân gas, phanh và tay lái, rồi sau đó kết nối chúng với một bộ xử lý đồ họa và máy tính chạy bằng thuật toán RLA do họ tự phát minh. Kết quả tối ưu nhất được máy trả lại là chiếc Renault Twizy sẽ di chuyển thẳng trên đường mà không bị chệch ra khỏi lề, trong thời càng lâu càng tốt. Tiếp đó, nhóm sẽ đưa thêm một người (biết lái xe) lên chiếc xe và bố trí để nó chạy trên đường ngoại ô. Người lái xe sẽ tìm cách chỉ cho xe biết đi đúng hướng và sau đó để máy tự lái. Cứ mỗi lần xe sắp di chuyển ra khỏi lề đường, người đó sẽ dừng lại, căn chỉnh cho đúng hướng, rồi sau đó lại để máy tiếp tục thao diễn. Nhờ cơ chế này, máy tính có thể học cách để điều chỉnh chiếc xe chạy đúng hướng chỉ trong khoảng 20 phút. Sau đó, quá trình này có thể tiếp tục và kéo dài một cách vô hạn định.
Nguồn: Anh Chung/Khoahocphattrien.vn